Institute of Science
and Technology
Laboratory
About us
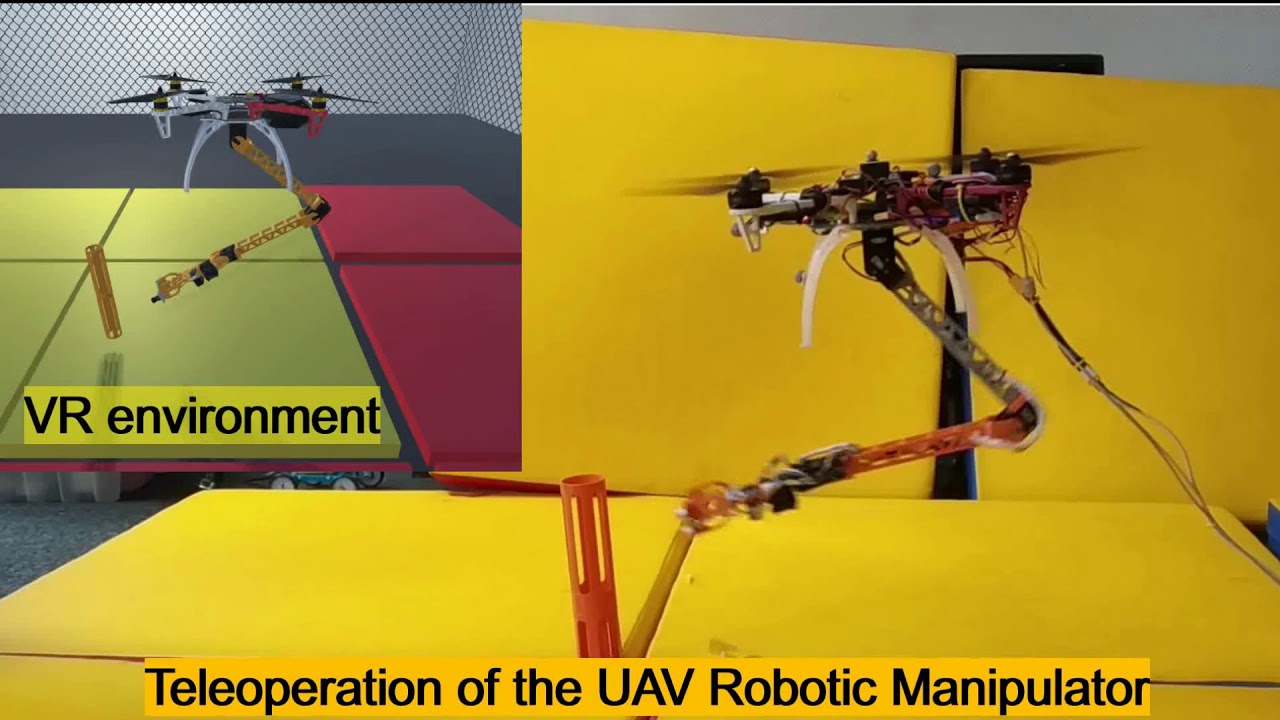
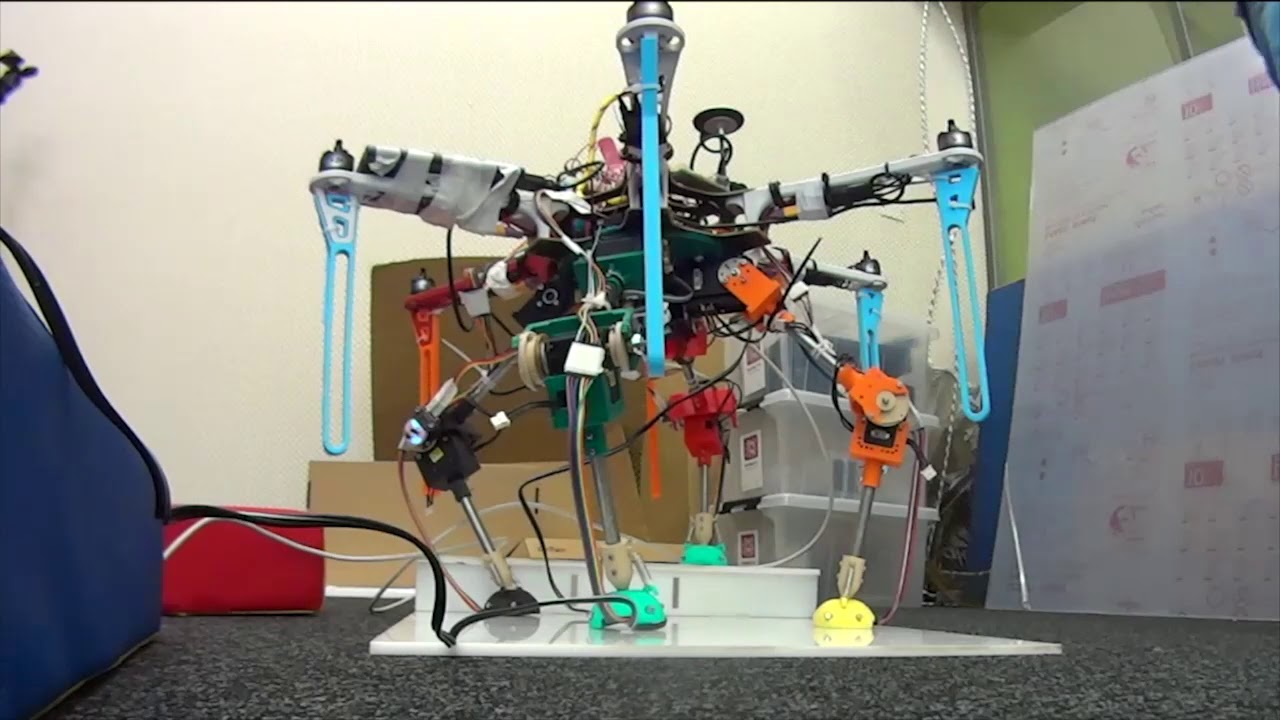
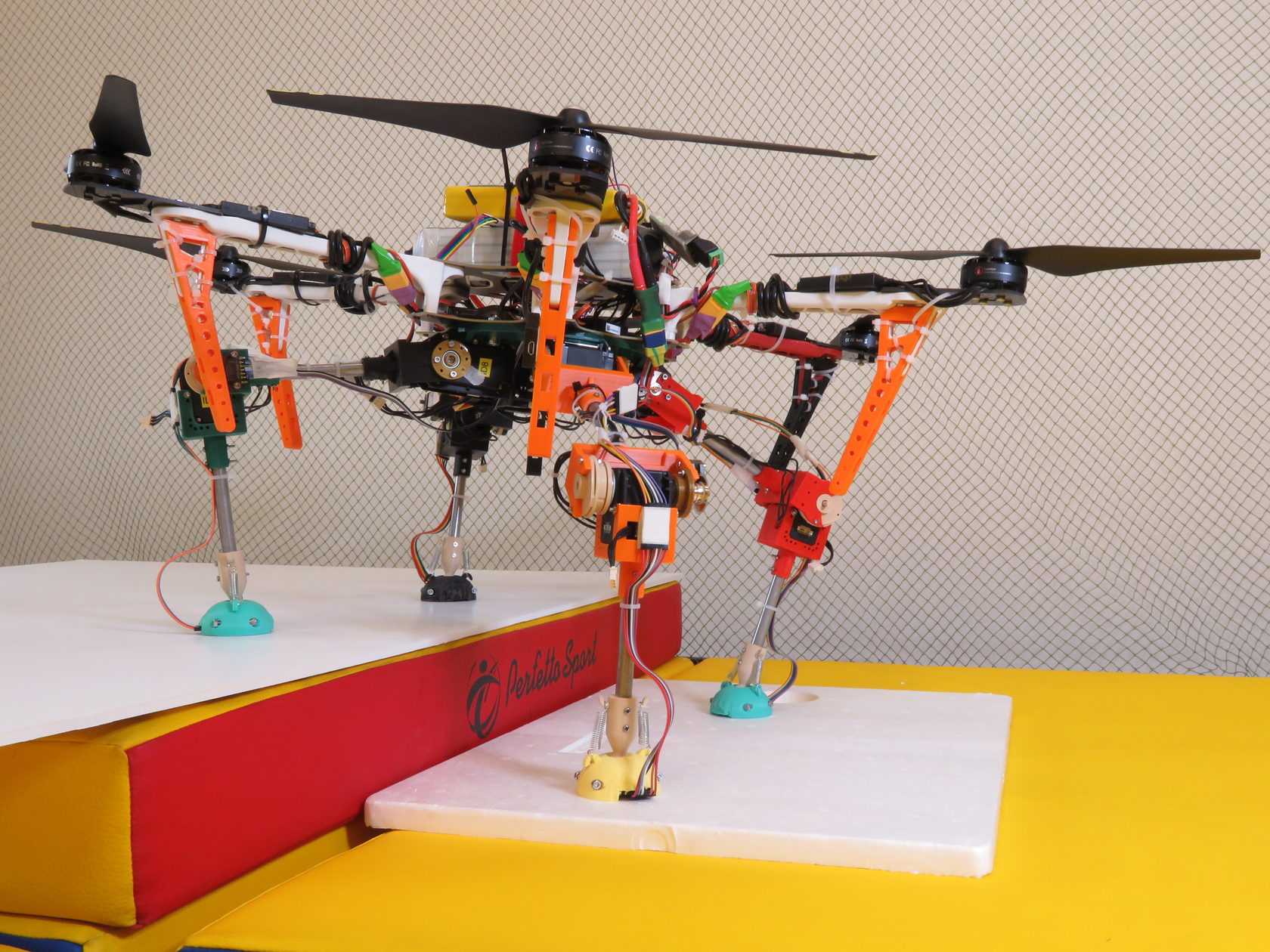
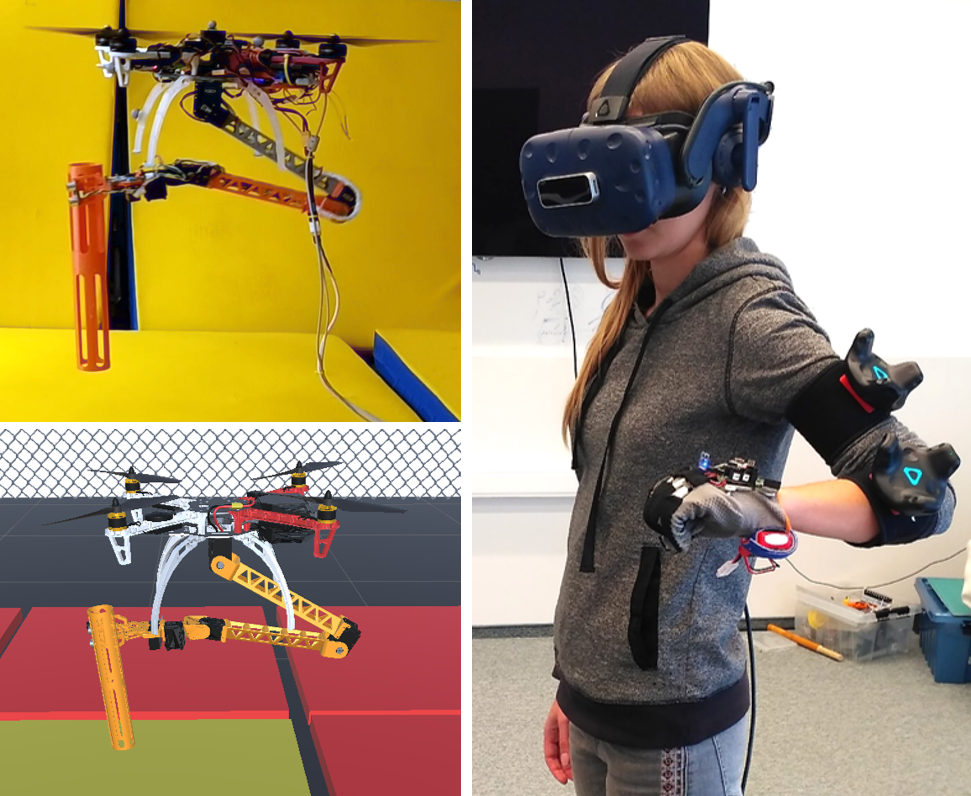
The Intelligent Space Robotics Laboratory works on large high-tech engineering projects. For example, we have developed an innovative human swarm communication system: a structure in which a human controls a constellation of drones and receives tactile feedback.
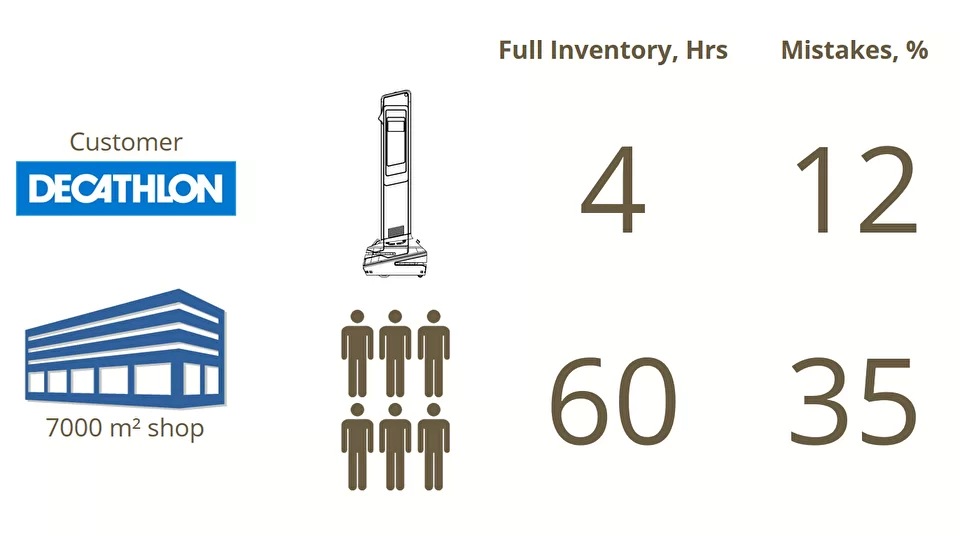
In Russia, we are pioneers in creating robots for warehouse inventory. We also create unique technologies in the field of VR and Hapiki . In addition, the GeSET team are 4-time winners of the Russian stage of the prestigious Eurobot robotics competition, and three years ago we were second in the world.
The team of the group

Dzmitry Tsetserukou
Нead of the Laboratory of Intelligent Space Robotics
Associate Professor

Daria Trinitatova
Laboratory of Intelligent Space Robotics
PhD Student, Research Intern


Oleg Soutenkov
Laboratory of Intelligent Space Robotics
research intern


Nipun Dhananjaya
Laboratory of Intelligent Space Robotics
Research Intern




Publications
D. Shadrin, T. Podladchikova, G. Ovchinnikov, A. Pavlov, M. Pukalchik, A. Somov. “Kalman Filtering for Accurate and Fast Plant Growth Dynamics Assessment,” in Proc. Int. Instrumentation and Measurement Technology Conf. (IEEE I2MTC), Dubrovnik, Croatia, May 25-28, 2020, pp. 1-6. (Scopus and WoS, H-index (SJR)=33). DOI: 10.1109/I2MTC43012.2020.9129053
IEEE Xplore: https://ieeexplore.ieee.org/document/9129053
C. Gabellieri, Y. Sarkisov, A. Coelho, L. Pallottino, K. Kondak, M. J. Kim, “Compliance Control of Cable-suspended Aerial Manipulator using Hierarchical Control Framework,” in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, (IROS 2020), Las Vegas, NV, USA, October 25-29, 2020, pp. 7196-7202. (No. 1 Conference in Intelligent Robotics and No. 2 in Robotics, Core2021 A, Scopus and WoS, H-index (SJR)=128), (acceptance rate 47 %).
DOI: 10.1109/IROS45743.2020.9340703
IEEE Xplore: https://ieeexplore.ieee.org/document/9340703
P. Yin, F. Wang, A. Egorov, J. Hou, J. Zhang, H. Choset, “SeqSphereVLAD: Sequence Matching Enhanced Orientation-invariant Place Recognition,” in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, (IROS 2020), Las Vegas, NV, USA, October 25-29, 2020, pp. 5024-5029. (No. 1 Conference in Intelligent Robotics and No. 2 in Robotics, Core2021 A, Scopus and WoS, H-index (SJR)=128)
DOI: 10.1109/IROS45743.2020.9341727
IEEE Xplore: https://ieeexplore.ieee.org/document/9341727